A Drone as Platform for Airborne Gamma-Ray Surveys to Characterize Soil and Monitor Contaminations
2018 Eage extended abstract Medusa.pdf
1. Summary
Gamma-ray spectrometers are an invaluable tool in the field of geophysics where they are used for geological mapping and mineral exploration. Recent technological advances introduce the emergence of a new platform for gamma-ray surveys: Unmanned Airborne Vehicles (UAVs) otherwise known as drones. This new platform enables the fast and efficient collection of environmental radiometric data in otherwise inaccessible areas. An overview is given of the technological and data-analysis developments to realize the use of a spectrometer under a drone.
As a result of weight and power optimization a spectrometer system based on a 1.0L NaI crystal can be used under a drone. The system collects gamma spectra with sufficient statistics to perform full spectrum analysis and determine variation in geophysical soil parameters. The platform can autonomously measure and process data giving real-time insight in the collected data and results. Two test cases are discussed in which the use and accuracy of this platform is validated for precision farming as well as locating and monitoring radioactive contaminations. It is concluded that a self-contained gamma-ray measurement system under a drone combines the best of two worlds by maintaining high resolution while increasing the ease of use.
2. Introduction
Gamma-ray spectrometry systems can be used to measure environmental gamma radiation. By measuring naturally occurring radionuclides, it has found applications in the field of geophysics where it is used for geological mapping and mineral exploration. Soil sediments contain small fractions of the radioactive isotopes 40K, 238U and 232Th. The ratio of these nuclides provides a “fingerprint” which can be used to characterize soils and sediments. In combination with laboratory measurements the nuclide information is used to determine texture of the topsoil and may function as a proxy for environmental parameters such as lutum fraction, organic matter content and heavy metal &organic pollution (Förstner et al., 2016). Gamma-ray spectrometry has the advantage that it is a non-intrusive, efficient and reliable method to show trends in the radionuclide distribution. These trends can be used to explore or compare geological regions (IAEA et al., 2003).
There are two standard survey types to obtain radiometric information of an area. Airborne surveys are used to gather relatively coarse information of a large area using small aircrafts which typically operate at heights between 40 and 160 meters above the ground. To collect a significant signal at moderate flying speeds, big and heavy spectrometer packs (20/40+L, 75/150+kg ) have to be used. The second type of surveys are vehicle- or foot-borne surveys where the distance between the detector and the ground is much smaller. This close proximity enables the use of much smaller spectrometers (2L, 8 kg) and typically results in a better spatial resolution. However, some terrains are difficult to access and make these close proximity type of surveys impossible. Due to recent technological advances a new survey type has emerged that fills the gap between the current methods: drone based gamma-ray surveys. The use of a drone allows the collection of high resolution data at remote or difficult accessible areas. A new spectrometer system had to be designed to meet the weight requirements of the drone and new data processing techniques had to be developed to interpret the collected data.
Previous efforts have developed and used similar systems to detect uranium bearing minerals (MacFarlane et al., 2014), to monitor environmental radioactive material due to the Fukushima nuclear powerplant disaster (Martin et al., 2016; Mochizuki et al., 2017) or to measure an abandoned iron mine (Pirttijärvi & Oy, 2016) to name just a few. However, none of these systems used detectors bigger than 200 ml and consequently are not able to collect statistically significant data for agricultural, environmental or mining applications. Although the aim of this paper is to present a device for agricultural or mining application this can easily be extended to surveys of anthropogenic material.
3. Development
3.1 Hardware
The signal of scintillator- based gamma-ray spectrometry systems can be increased by enlarging the size (mass) of the detection crystal. This causes the design considerations of the spectrometer to be in conflict with the low weight requirements of drones. The main technological challenge was to decrease the weight while maintaining its functionalities. Medusa Radiometrics (http://www.medusa-radiometrics.com) has developed a fully autonomous gamma-ray spectrometer containing a 1.0L NaI scintillation crystal that not only can measure and record the radiation but can also perform initial analysis to determine the 40K, 238U and 232Th concentrations in real-time. The whole system weights just above 6 kilograms and can therefore be mounted under commercial available drones (such as the DJI M600 Pro used during testing). On top of the fully embedded functionality of the system it has also been adapted to be ultra-low power and thus placing virtually no restrictions on power requirements
3.2 Data analysis
Full Spectrum Analysis (FSA) comprises the statistically most efficient method to derive nuclide concentrations from gamma-ray spectra. The method utilizes virtually all spectral data present in a gamma spectrum to derive concentrations. Using the full spectrum has the added benefit of an increase in precision compared to conventional windows analysis (Hendriks et al., 2001). The key parameter in this processing is the use of so-called “standard spectra”. These spectra are the response of a gamma spectrometer on a pure source of each of the nuclides. A precise determination of the shape and intensity of these curves is essential for determining absolute concentrations. These response curves are determined for this detector system by Monte Carlo modelling and validated by a calibration procedure (van der Graaf et al., 2011).
Initial tests with the system have shown that the interpretation of drone-borne gamma-ray data needs to be corrected for the changed geometry. When increasing the elevation of the detector above ground there are two processes at play. In the first place there is an increase in the effective measured volume. Radiation is emitted uniformly in all directions and thus moving away from the ground increases the source ‘seen’ by the detector (figure 1). At the same time gamma-radiation is attenuated by the medium through which it moves, causing deeper sections of the soil and volumes at an increased angle from the detector to be attenuated more than the shallow volume directly underneath the detector. Counter intuitively this means that the relative size of the spot that contributes to the radiation seen by the sensor, decreases when moving to greater heights (Duval et al., 1971). These processes have been studied and methods have been developed for the case of airborne data collection, however this method breaks down in the range of 5-40 meter height in which the drone operates (IAEA, 2003).
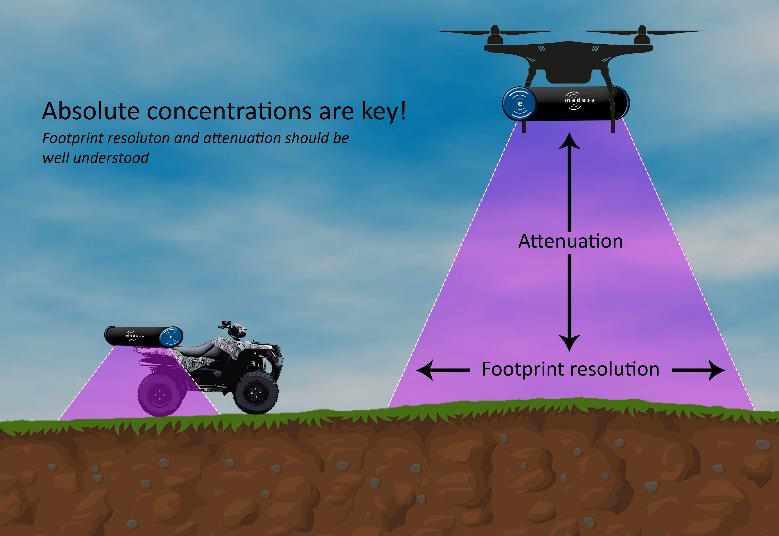
Figure 1: Difference in viewing area between ground and drone measurements. Due to the increase in elevation the effective spot size on the ground increases. At the same time due to the increased layer of air between the ground and the detector the signal will deteriorate.
Calibration procedures
The model for height corrections presented by the IAEA is based on an approximation using a linear attenuation model. This model both overlooks the reduction in measured signal at low heights and the contribution of Compton scattering from higher energies to lower energies (IAEA, 2003). To overcome the limitations of these models the data has been processed by using Full Spectrum Analysis (FSA) where the calibrated spectra for 40K, 238U and 232Th are determined for each relevant elevation from simulations with the Monte Carlo code MCNPX (Pelowitz, 2011). Such simulations are an excellent tool to study the detector response of gamma-ray measurements. The transport of radiation in a medium such as ground or air is a complex, but a well understood process.
4. Applications
Precision farming
To validate the applicability of the developed measurement system and data-analysis methods based on the Monte Carlo simulations the approach was tested in the field. A measurement was conducted on a test field used for agriculture in the Dutch province Flevoland. This field was selected because of its inhomogeneous spatial composition and accessibility for ground-borne measurements. This field has been measured on foot with a 2L CsI scintillator system and with the drone measurement system flying at an average height of 14 meters above the field. The survey lines for the on foot and drone measurements had an average spacing of 25 and 35 meters respectively. In addition to the gammameasurements soil samples have been analysed in the laboratory for thorium concentration and clay content. The correlation between these parameters enabled using the thorium concentrations as a proxy for clay-content. A quantitative comparison of the results show excellent agreement of the collected nuclide concentrations for thorium (figure 2) between the three measurements. The expected loss in resolution due to the increased distance from the ground is also qualitatively observed from these figures.
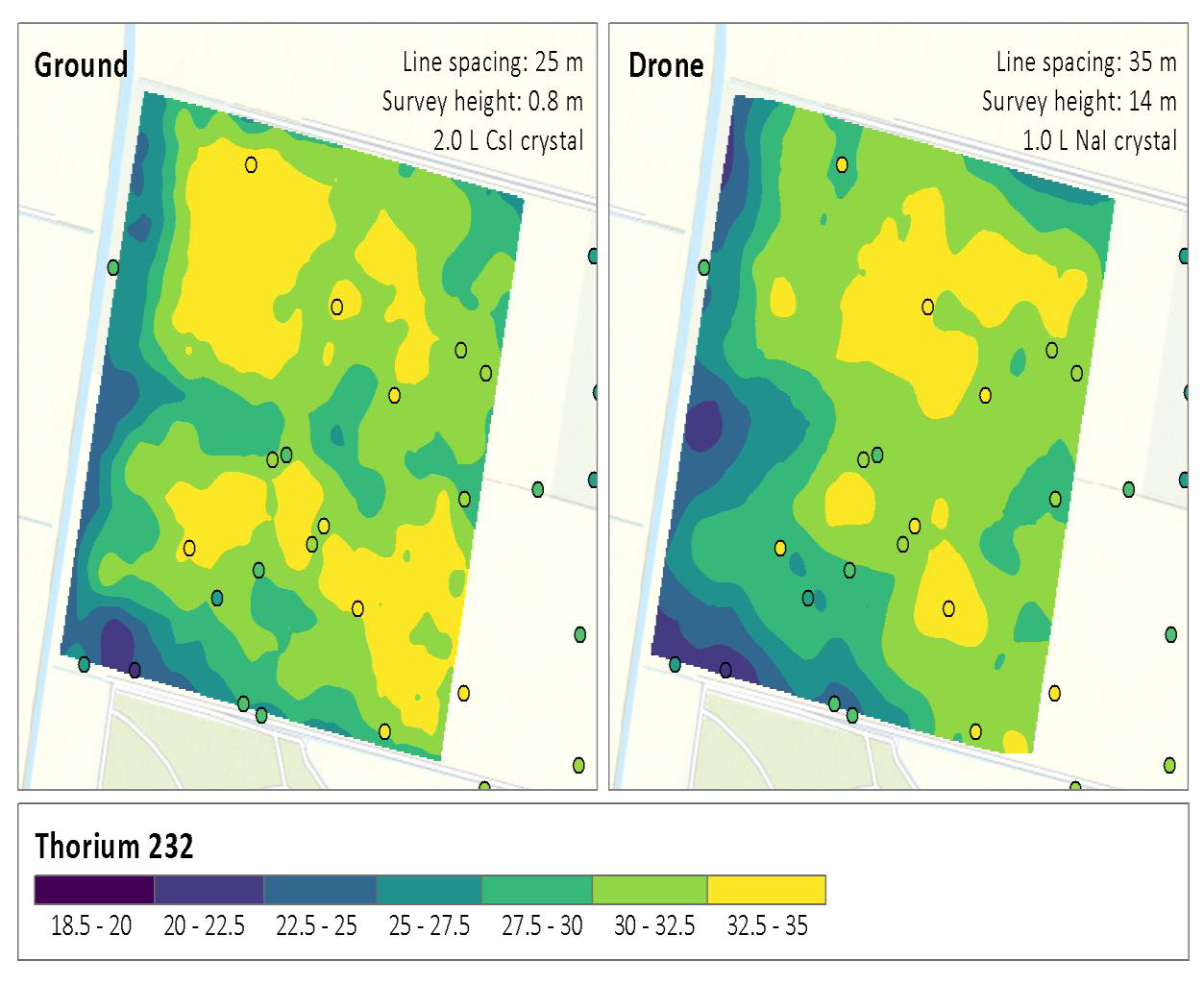
Figure 2: Comparison of the resulting 232Th concentrations for ground and drone measurements, the detector is placed at 0.8 and 14 meter height above the ground respectively. Note that the absolute concentrations match and the resolution of the drone measurements decreased. This deterioration is expected due to increase in distance from the ground resulting in an inevitable loss in resolution (see figure 1). The circles represent the soil samples that have been analyzed in the laboratory.
Mapping mine tailings
The second test case involved measurements at a former uranium mine where processed rock from the mine has been returned to the excavation. Helicopter airborne data was available for this site. A qualitative comparison with drone-based measurements of the uranium concentration showed again an excellent match. As a second result the drone measurement has identified a (non-toxic) accumulation of 238U at an on-site sediment deposition basin which was not present during the initial helicopter survey. This last finding has been confirmed with a handheld detector. Finding this anomaly proves the applicability of the drone platform for contamination monitoring at critical sites.
5. Conclusions
The development of a gamma-ray detector system that can be mounted under a drone has allowed the fast and efficient mapping of environmental radioactivity. Due to power and weight optimization a sufficiently large crystal can be used to collect full spectra with sufficient statistics to determine variations in geophysical soil parameters such as the clay-fraction. The newly developed drone-based gamma spectrometer can autonomously measure and process data, giving real-time insight in the collected results, and thus, combining the best of the air- and ground-borne gamma-ray measurements.
Outlook
Is has been shown that the data collected with a drone matches the data collected by conventional ground or airborne measurements. Excellent results have been obtained by using an phenomenological approach to calibrate the nuclide response curves for this particular detector. Current research is working on theorizing this empirical model and extend the applications to a general calibration method for scintillation detectors used in drone borne applications
Acknowledgements
The research has been co-funded by the European Fund for Regional Development (EFRO). Furthermore, we would like to thank the contribution of both Wageningen Environmental Research and Medusa Radiometrics for the collaboration on the precision farming project.
References
D B. Pelowitz. (2011). MCNPX Users Manual Version 2.7.0. LA-CP-11-00438.
Duval, J. S., Cook, B., & Adams, J. A. S. (1971). Circle of Investigation of an Air-borne Gamma-Ray Spectrometer. Journal of Geophysical Research December, 76(10). https://doi.org/10.1029/JB076i035p08466
Förstner, U., Hollert, H., Brinkmann, M., Eichbaum, K., Weber, R., & Salomons, W. (2016). Dioxin in the Elbe river basin: policy and science under the water framework directive 2000–2015 and toward 2021 Background. Environ Sci Eur, 28. https://doi.org/10.1186/s12302-016-0075-8
Hendriks, P. H. G. M., Limburg, J., & De Meijer, R. J. (2001). Full-spectrum analysis of natural gamma-ray spectra. Journal of Environmental Radioactivity, 53, 365–380.
IAEA, Nicolet, J. P., & Erdi-Krausz, G. (2003). Guidelines for radioelement mapping using gamma-ray spectrometry data. International Atomic Energy Agency, (5), 179. https://doi.org/IEAETECDOC- 1363
MacFarlane, J. W., Payton, O. D., Keatley, A. C., Scott, G. P. T., Pullin, H., Crane, R. A., … Scott, T. B. (2014). Lightweight aerial vehicles for monitoring, assessment and mapping of radiation anomalies. Journal of Environmental Radioactivity.
https://doi.org/10.1016/j.jenvrad.2014.05.008
Martin, P. G., Kwong, S., Smith, N. T., Yamashiki, Y., Payton, O. D., Russell-Pavier, F. S., … Scott, T. B. (2016). 3D unmanned aerial vehicle radiation mapping for assessing contaminant distribution and mobility. International Journal of Applied Earth Observation and
Geoinformation, 52, 12–19. https://doi.org/10.1016/j.jag.2016.05.007
Mochizuki, S., Kataoka, J., Tagawa, L., Iwamoto, Y., Okochi, H., Katsumi, N., … Ohsuka, S. (2017). First demonstration of aerial gamma-ray imaging using drone for prompt radiation survey in Fukushima. Retrieved from https://doi.org/10.1088/1748-0221/12/11/P11014
Pirttijärvi, M., & Oy, R. (2016). Radai’s UAV based radiometric measurements at Rautuvaara mine in
Kolari. Radai Survey Report (Www.Radai.Fi).
van der Graaf, E. R., Limburg, J., Koomans, R. L., & Tijs, M. (2011). Monte Carlo based calibration of scintillation detectors for laboratory and in situ gamma ray measurements. Journal of Environmental Radioactivity. https://doi.org/10.1016/j.jenvrad.2010.12.001